SFZ Roboter
Folge der Linie und
Rette die Verletzten
16.03.2019
02.03.2024
Information
Das Ziel der Roboter, die ich im SFZ entwickle, ist es, einen Parkour, siehe offizielle Regeln offizielle Regeln, möglichst genau und erfolgreich zu absolvieren. Der Parkour besteht aus 2 Teilen, der Stecke und der Rescue Area. Der Roboter muss der Strecke, die mit einer schwarzen Linie markiert ist, folgen und verschiedene Schikanen, wie z.B. Steigungen oder grüne Punkte, die die Abbiegerichtung anzeigen, passieren. Wenn der Roboter die Strecke erfolgreich absolviert hat, muss er in der Rescue Area Kugeln, die die Opfer der Rettungssimulation symbolisieren, retten und an bestimmten Stellen platzieren.
~ 890 Hours




Lego Roboter
Der Anfang
2018 bin ich durch einen Freund zum ersten Mal mit dem SFZ in Kontakt gekommen. Für den Robocup Junior Wettbewerb, der 2020 in Vöhringen stattfindet, habe ich mit meinem Team im SFZ 1,5 Jahre lang einen Lego-Roboter entwickelt. An dem Wettbewerb nehmen ca. 30 Teams in verschiedenen Altersklassen teil, wir haben den 8. von 29 Plätzen belegt.
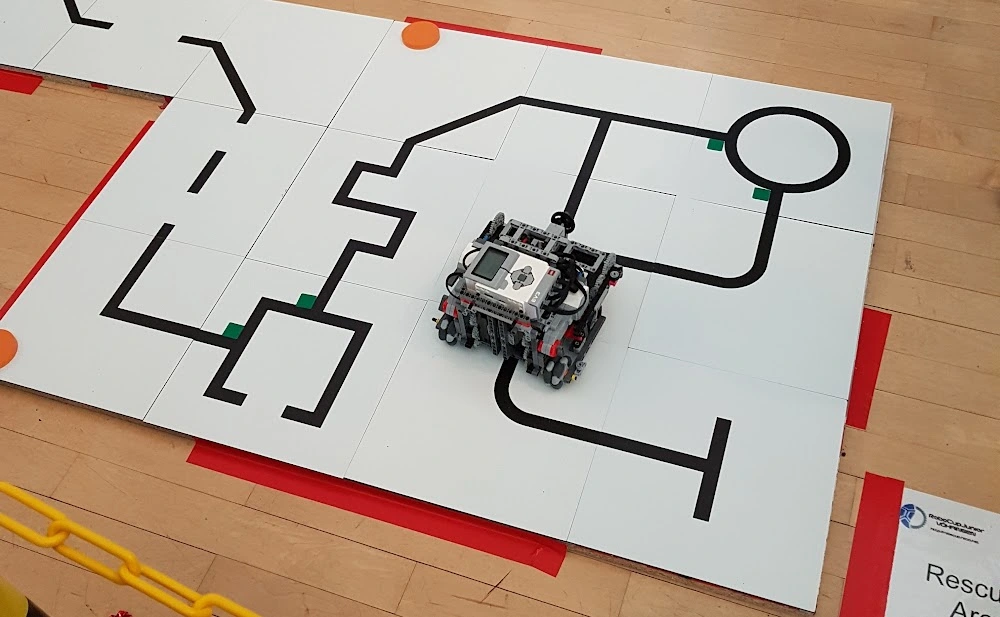
Lego Roboter
Um die verschiedenen Aufgaben im Parkour bewältigen zu können, ist der Lego Roboter mit verschiedenen Sensoren und Motoren ausgestattet. Insgesamt verfügt der Roboter über 2 Farbsensoren, 1 Touchsensor und 1 Infrarotsensor, 2 Motoren zum Steuern der Richtung und 1 Motor zum aufsammeln der Kugeln. Programmiert wurde der Roboter mit ev3dev und Python. Das Gehirn des Roboters ist der EV3-Legostein, der alle Aktoren und Sensoren steuert.
ID10T - Roboter
Soft- & Hardware
Nach dem Lego-Roboter suchten wir eine neue Herausforderung. Wir beschlossen, einen Roboter von Grund auf neu zu entwickeln. Als Mikrocontroller für den Roboter haben wir uns für einen Arduino Mega 2560 entschieden. Die Omni Wheels werden von 4 unabhängigen Schrittmotoren angetrieben. Die Linie wird mit Infrarotsensoren und der grüne Punkt mit Farbsensoren erkannt.
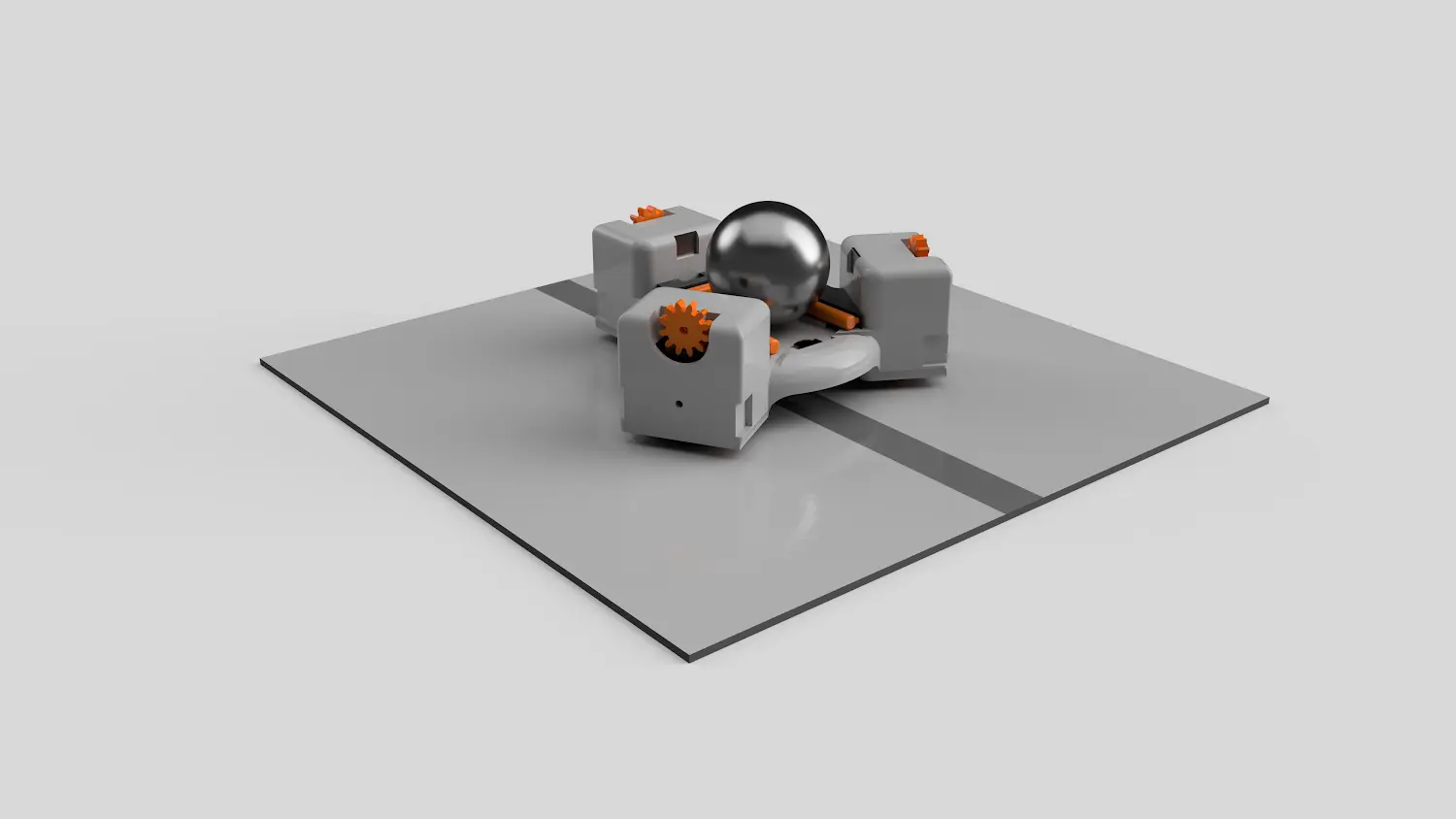
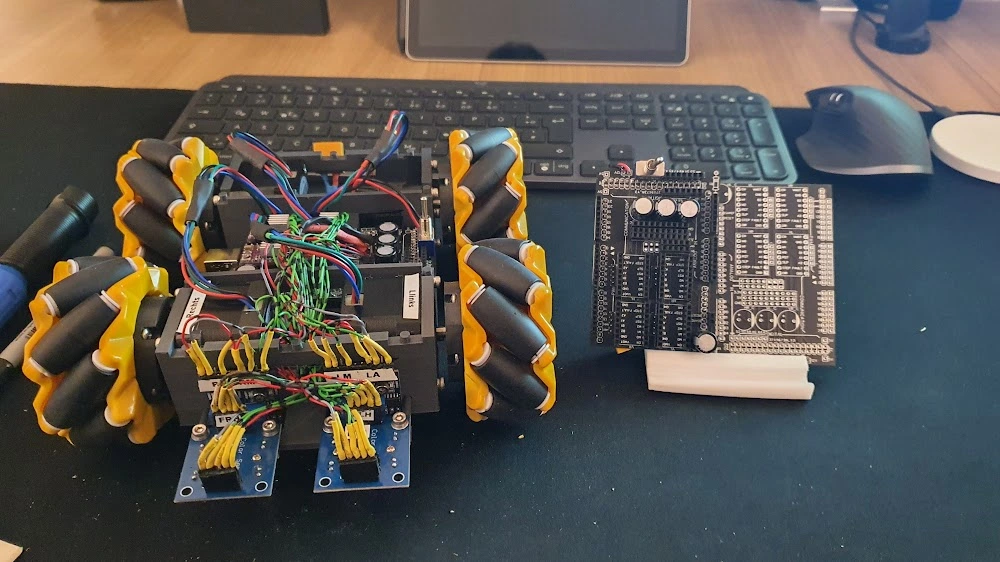
ID10T Roboter
Die speziellen Omni Wheels ermöglichen es dem Roboter, sich durch Bewegungstransformation in alle möglichen Richtungen zu bewegen. Um die Motoren und Sensoren sauber anzusteuern, haben wir eine Platine entwickelt, die auf den Arduino gesteckt werden kann und automatisch die nötigen Pins für die Motortreiber und die benötigte Peripherie verbindet.
Follower
Soft- & Hardware
Um den ID10T Roboter zu verbessern, habe ich einen überarbeiteten Roboter entwickelt, der mit einem ähnlichen Omni Wheel Konzept arbeitet. Der Roboter hatte eine Kamera zur Linienerkennung und ein ESP32 Modul zur Richtungsberechnung und Motorsteuerung.
Kameraerkennung
Der Roboter benutzt ein 8cm x 8cm großes Bild um die Richtung der Linie zu berechnen. Den Algorythmus habe ich zu 100% selbst entwickelt, nach dem das Bild für die Performance Optimierung von 480 x 480 auf 30 x 30 Pixel herunterskaliert wird, bekommt jeder Pixel einen festen Farbwert zugewiesen. Anhand dieser Farbwerte berechnet ein Pathfinding-Algorithmus die Richtung, in die sich der Roboter bewegen soll.